Sgorbissa, Antonio, and Renato Zaccaria. "Planning and obstacle avoidance in mobile robotics." Robotics and Autonomous Systems 60.4 (2012): 628-638.
여러 Navigation 알고리즘에 대해 설명이 되어있다. 정작 이 논문은 사람과 로봇이 함께 있는 공간 속에서 동작하는 것을 목표로 하고 있다. 자세한 것은 읽어보도록.
Zhu, Yi, et al. "A new method for mobile robots to avoid collision with moving obstacle." Artificial Life and Robotics 16.4 (2012): 507-510.
기존의 VFH에 비해서 움직이는 장애물에 대한 정보를 추가하였다.
1. 장애물과 거리를 계산해서 갈 수 없는 방향을 정한다.
2. 움직이는 장애물의 속도를 고려한 새로운 제어 방법을 고안하였다.
3. 방향을 정할 때 움직이는 장애물을 고려하였다.
/ 딱히 다른 알고리즘과 비교하진 않았다.
Ulrich, Iwan, and Johann Borenstein. "VFH+: Reliable obstacle avoidance for fast mobile robots." Robotics and Automation, 1998. Proceedings. 1998 IEEE International Conference on. Vol. 2. IEEE, 1998.
VFH*의 전신인 논문이자 나름 유명한 논문이다. 이 알고리즘은 크게 네 단계로 나뉜다.
1. Polar Histogram을 만든다. (로봇의 r을 고려해서 장애물의 크기를 키운다.)
2. Binary Polar Histogram을 만든다.
3. Masked Polar Histogram을 만든다.
4. 방향을 서정한다.
아래는 내가 만든 시뮬레이터로 구현한 VFH이다.
'Enginius > Robotics' 카테고리의 다른 글
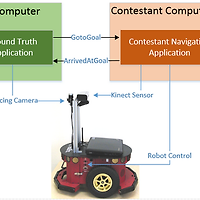
| MICROSOFT ROBOTICS KINECT NAVIGATION EVENT CONTEST (0) | 2014.05.09 |
|---|---|
| Arduino in Robot! (0) | 2014.04.04 |
| Motion control simulation using Autoregressive GP motion control (0) | 2014.03.11 |
| Kalman Filter 유도하기 (1) | 2014.03.05 |
| Matlab RobotLib (3) | 2014.02.10 |