 MuJoCo Walker2d
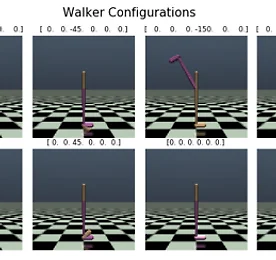
Let's find out what Walker2d is. State (17dim) def _get_obs(self):qpos = self.sim.data.qposqvel = self.sim.data.qvel return np.concatenate([qpos[1:], np.clip(qvel, -10, 10)]).ravel() qpos: [x, y, angle, ?, ?, ?, ?, ?, ?]qvel: velocity of [x, y, angle, ?, ?, ?, ?, ?, ?]observation: [y, angle, ?, ?, ?, ?, ?, ?, xvel, yvel, angleVel, ?, ?, ?, ?, ?, ?] Action (6dim)
더보기
MuJoCo Walker2d
Let's find out what Walker2d is. State (17dim) def _get_obs(self):qpos = self.sim.data.qposqvel = self.sim.data.qvel return np.concatenate([qpos[1:], np.clip(qvel, -10, 10)]).ravel() qpos: [x, y, angle, ?, ?, ?, ?, ?, ?]qvel: velocity of [x, y, angle, ?, ?, ?, ?, ?, ?]observation: [y, angle, ?, ?, ?, ?, ?, ?, xvel, yvel, angleVel, ?, ?, ?, ?, ?, ?] Action (6dim)
더보기



