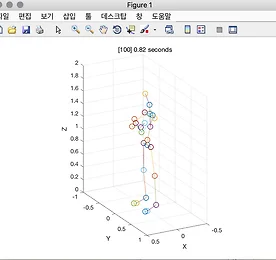
Install Ubuntu (+apps) on MSI laptop MSI GT75 Titan 8RG Intel CORE i9 8th Gen + GTX 1080 인데, 설치가 쉽게 되려나 모르겠다. 일단은, https://medium.com/@gentra/how-to-install-ubuntu-16-04-on-msi-ge62-6qc-ae4f30f50465를 따라해보자. Ubuntu 16.04 USB는 만들었다. Boot에서 secure boot는 꺼야 한다. 현재는 secure boot support를 disabled로 했다. 이게 맞는지는 모르겠다. Boot mode는 UEFI로 하였다. 윈도우는 그냥 밀어버리자! Install Ubuntu alongside Windows Boot Manager를 선택했다. 잘하는 걸까?이게 한번에 되면 그냥 대박이다. 좋은 세상이 드.. 더보기 Install bullet3 and MuJoCo in Macbook Installation https://github.com/bulletphysics/bullet3Follow the guide from the page above. screen -S jupytersource activate tensorflowjupyter notebook Install MuJoCo # create conda env with python v3.5.2 # https://github.com/openai/mujoco-py/issues/47#issuecomment-312551946 conda create --name gym python=3.5.2 source activate gym mkdir -p ~/openai && cd ~/openai # install gym # https://github.co.. 더보기 Handling 'bvh' format from OptiTrack in MATLAB We use codes from the following github:https://github.com/wspr/bvh-matlab Loading code (loadbvh.m)function [skeleton,time] = loadbvh(fname,varargin) %% LOADBVH Load a .bvh (Biovision) file. % % Loads BVH file specified by FNAME (with or without .bvh extension) % and parses the file, calculating joint kinematics and storing the % output in SKELETON. % % Optional argument 'delim' allows for settin.. 더보기 Intel Up Board for Robotics Installing Ubuntu 16.04 Everything we need is:https://01.org/developerjourney/recipe/intel-realsense-robotic-development-kit#step2Important things to remember is to boot into the Aptio Setpup Utility by pressing del. - Make bootable USB https://www.makeuseof.com/tag/how-to-boot-a-linux-live-usb-stick-on-your-mac/ - Follow dev kit https://01.org/developerjourney/recipe/intel-realsense-robotic-dev.. 더보기 이전 1 ··· 5 6 7 8 9 10 11 ··· 161 다음